Error
Perpetual overbalanced wheel with spheres
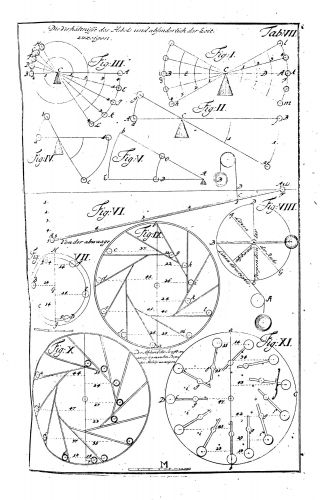
This perpetual overbalanced wheel based on the movement of spheres can be conceptually traced back to the wheels designed by Leonardo in the 1490s. The model presented here was developed by Jacob Leupold (1674-1727) in his Theatrum Machinarum Generale, in which he illustrated various devices for perpetual motion. The overbalanced sphere system is based on a mechanical configuration capable of generating a constant break in the equilibrium of the wheel. In this case, the traditional circular paths that generated an asymmetry between descent (convex path) and ascent (concave path) are replaced by inclined straight paths. Leupold introduces a dodecagonal hub and uses its sides to divide the surface of the wheel into twelve triangular-shaped compartments. In each compartment he places a sphere, which will move from the hub towards the circumference along the inclined path described by the hypotenuse. Leupold calculated that the moment generated by the spheres near the hub is less than that generated by the spheres near the outer circumference and concluded that, as the wheel is constantly overbalanced, should move in perpetual motion.